Agentic Robot Policy Self-Improvement in the Real World¶
Ch04.374 Agentic Robot Policy Self-Improvement in the Real World¶
📊 Level ⭐⭐ | 6.6KB |
entities/nvidia-enpire-agentic-robot-policy-self-improvement.md
Agentic Robot Policy Self-Improvement in the Real World¶
原文存档:原文存档
核心内容¶
Published Time: Wed, 17 Jun 2026 23:48:33 GMT
Markdown Content:
ENPIRE: Agentic Robot Policy Self-Improvement in the Real World¶
, Jia Xie2†, Tonghe Zhang2†, Haotian Lin2†, Letian "Max" Fu3, Haoru Xue3, Jalen Lu 2,
Yi Yang2, Cunxi Dai2, Zi Wang1, Jimmy Wu1, Guanzhi Wang1, S. Shankar Sastry3, Ken Goldberg3,
Linxi "Jim" Fan1‡, Yuke Zhu1‡, Guanya Shi2‡
1 NVIDIA 2 CMU 3 UC Berkeley†Equal contribution‡Equal advising
![]()
![]()
![]()
Abstract¶
Achieving dexterous robotic manipulation in the real world relies heavily on human supervision and algorithmic engineering, which is a central bottleneck in the pursuit of general physical intelligence. Although emerging coding agents can generate code to automate algorithm search, their successes remain largely confined to digital environments. We conjecture that the missing abstraction to automate robotics research is a repeatable feedback loop for real-world policy improvement: reset the scene, execute a policy, verify the outcome, and refine the next iteration.
To bridge this gap, we introduce ENPIRE, a harness framework for coding agents that instantiates this physical feedback routine with four core modules: an Environment module (EN) for automatic reset and verification, a Policy Improvement module (PI) that launches policy refinement, a Rollout module (R) to evaluate policies with single or multiple physical robots operating in parallel, and an Evolution module (E) in which coding agents analyze logs, consult literature, improve training infrastructure and algorithm code to address failure modes.
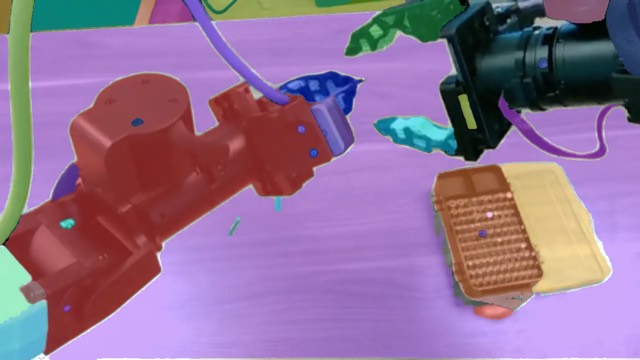
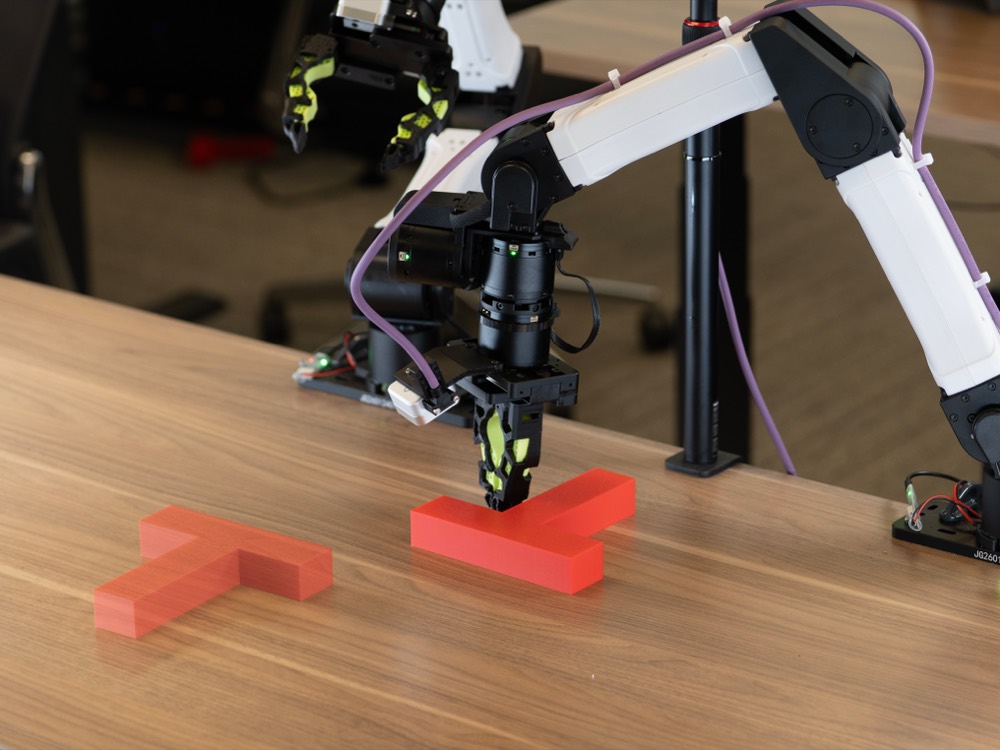
This closed-loop system transforms real-world robot learning into a controllable optimization procedure that agents can manage, thus minimizing human effort while allowing fair ablations across training recipes and agent variants. Powered by ENPIRE, frontier coding agents can autonomously develop a policy to achieve a 99% success rate on challenging, dexterous manipulation tasks in the real world, such as PushT, organizing pins into a pin box, and using a cutter to cut a zip tie.
Coding agents can improve policies with various PI regimes, such as heuristic learning, tool calling, behavior cloning, offline or online RL. Moreover, ENPIRE can be significantly accelerated on a robot fleet, and we propose two metrics, namely, Mean Robot Utilization (MRU) and Mean Token Utilization (MTU) to measure the efficiency of multiagent physical autoresearch. We also include simulation results in RoboCasa. Our findings suggest a practical and scalable path toward autonomously advancing robotics in the real world.
Learned Manipulation Policy¶
Policies trained with ENPIRE reach a 99% pass@8 success rate across the showcased manipulation tasks.
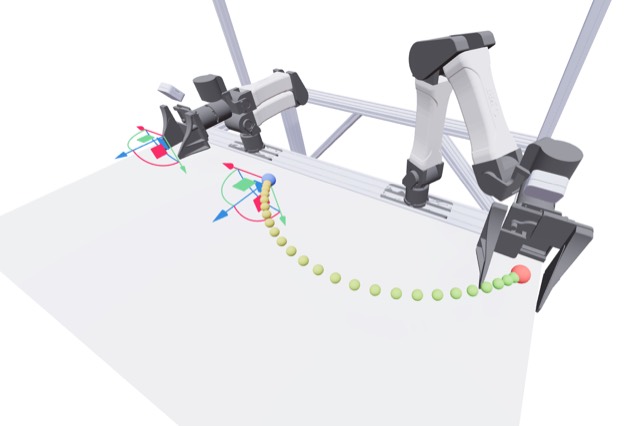
ENPIRE runs fully autonomously on real robots. Working only through the automated reset and verification interface, a team of coding agents proposes algorithmic hypotheses (heuristic learning, behavior cloning, offline and online RL), tests them against the real-world success rate, and keeps the changes that move it. The idea tree below traces that search as a hypothesis git-tree — one branch per agent, one node per idea tried — plotted on the same wall-clock-time axis as the success-rate curve, so you can see the ideas that moved the curve upward.
Figure 1:Each coding agent explores its own branch of ideas, one lane per branch. Every dot is an idea it tried; a green ring marks an idea that raised the team’s average success rate, and green curves trace cross-agent inspiration. The lower panel tracks the team’s average success rate climbing over research wall-clock time.
ENPIRE System¶
Construct Environment
Policy Improvement
Action
Obs
Reward
env.py
1
class InsertionEnv:
2
def reset(self):
3
TODO: auto task reset¶
4
pick_and_place(obj, target)
5
go_home()
6
...
7
8
def get_reward(self, obs, act):
9
TODO: scalar reward¶
10
mask = sam3(obs['left'])
11
pos = boundlsdf(obs, mask)
12
...
13
14
def get_observation(self):
15
...
16
17
def step(self, act):
18
...
Human User
Coding Agent
Tool APIs
Perception
Planning

Control
 ENPIRE Environment
ENPIRE Environment
01 Literature review
PLD RL-Token CaP-X
02 Propose algorithm variant
Heuristics Off2On RL Code-as-policy BC
03 Optimize Infra
Data Sampler Param Sweep
04 Summarize experiment result
Hillclimb Timeline

GPU insertion

Pin insertion
Push-T

Zip tie cutting
Real-world t